
Introduction #
The primary goal of the Semantic Drone Dataset is to enhance the safety of autonomous drone flight and landing procedures through improved semantic comprehension of urban environments. This dataset comprises imagery captured from a bird’s-eye (nadir) perspective, showcasing over 20 houses, taken at altitudes ranging from 5 to 30 meters above the ground. The images are acquired using a high-resolution camera with a size of 6000x4000 pixels (24 megapixels). The training set includes 400 publicly accessible images, while the test set consists of 200 private images. Additionally, the dataset provides bounding box annotations for person detection within both the training and test sets.
 Homepage
HomepageSummary #
Semantic Drone Dataset v1.1 is a dataset for a semantic segmentation task. It is used in the drone inspection domain.
The dataset consists of 400 images with 40169 labeled objects belonging to 24 different classes including obstacle, paved-area, person, and other: vegetation, dirt, gravel, wall, grass, fence, rocks, roof, tree, fence-pole, ar-marker, bicycle, window, water, bald-tree, car, pool, door, dog, unlabeled, and conflicting.
Images in the Semantic Drone dataset have pixel-level semantic segmentation annotations. All images are labeled (i.e. with annotations). There is 1 split in the dataset: train (400 images). The dataset was released in 2019 by the Institute of Computer Graphics and Vision (ICG), Graz University of Technology, Austria.
Here are the visualized examples for the classes:
Explore #
Semantic Drone dataset has 400 images. Click on one of the examples below or open "Explore" tool anytime you need to view dataset images with annotations. This tool has extended visualization capabilities like zoom, translation, objects table, custom filters and more. Hover the mouse over the images to hide or show annotations.
























Class balance #
There are 24 annotation classes in the dataset. Find the general statistics and balances for every class in the table below. Click any row to preview images that have labels of the selected class. Sort by column to find the most rare or prevalent classes.

Class ㅤ | Images ㅤ | Objects ㅤ | Count on image average | Area on image average |
|---|---|---|---|---|
obstacle➔ mask | 389 | 6806 | 17.5 | 3.64% |
paved-area➔ mask | 380 | 4496 | 11.83 | 39.72% |
person➔ mask | 367 | 1525 | 4.16 | 1.15% |
vegetation➔ mask | 359 | 7736 | 21.55 | 7.91% |
dirt➔ mask | 332 | 6296 | 18.96 | 3.86% |
gravel➔ mask | 330 | 3499 | 10.6 | 8.86% |
wall➔ mask | 292 | 1903 | 6.52 | 3.69% |
grass➔ mask | 273 | 1843 | 6.75 | 29.28% |
fence➔ mask | 212 | 986 | 4.65 | 1.81% |
rocks➔ mask | 210 | 1279 | 6.09 | 1.37% |
Co-occurrence matrix #
Co-occurrence matrix is an extremely valuable tool that shows you the images for every pair of classes: how many images have objects of both classes at the same time. If you click any cell, you will see those images. We added the tooltip with an explanation for every cell for your convenience, just hover the mouse over a cell to preview the description.
Images #
Explore every single image in the dataset with respect to the number of annotations of each class it has. Click a row to preview selected image. Sort by any column to find anomalies and edge cases. Use horizontal scroll if the table has many columns for a large number of classes in the dataset.
Class sizes #
The table below gives various size properties of objects for every class. Click a row to see the image with annotations of the selected class. Sort columns to find classes with the smallest or largest objects or understand the size differences between classes.
Class | Object count | Avg area | Max area | Min area | Min height | Min height | Max height | Max height | Avg height | Avg height | Min width | Min width | Max width | Max width |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
vegetation mask | 7736 | 0.37% | 30.34% | 0% | 1px | 0.03% | 4000px | 100% | 259px | 6.49% | 1px | 0.02% | 5992px | 99.87% |
obstacle mask | 6806 | 0.21% | 18.12% | 0% | 1px | 0.03% | 3999px | 99.97% | 242px | 6.04% | 1px | 0.02% | 5997px | 99.95% |
dirt mask | 6296 | 0.2% | 19.31% | 0% | 1px | 0.03% | 4000px | 100% | 222px | 5.54% | 1px | 0.02% | 5999px | 99.98% |
paved-area mask | 4496 | 3.36% | 99.79% | 0% | 1px | 0.03% | 4000px | 100% | 569px | 14.22% | 1px | 0.02% | 6000px | 100% |
gravel mask | 3499 | 0.84% | 29.9% | 0% | 1px | 0.03% | 4000px | 100% | 511px | 12.78% | 1px | 0.02% | 5999px | 99.98% |
wall mask | 1903 | 0.57% | 15.78% | 0% | 1px | 0.03% | 4000px | 100% | 509px | 12.71% | 1px | 0.02% | 5996px | 99.93% |
grass mask | 1843 | 4.34% | 99.41% | 0% | 1px | 0.03% | 4000px | 100% | 655px | 16.38% | 1px | 0.02% | 6000px | 100% |
person mask | 1525 | 0.28% | 5.58% | 0% | 8px | 0.2% | 1680px | 42% | 301px | 7.53% | 13px | 0.22% | 2527px | 42.12% |
rocks mask | 1279 | 0.22% | 9.06% | 0% | 2px | 0.05% | 4000px | 100% | 299px | 7.47% | 1px | 0.02% | 2883px | 48.05% |
fence mask | 986 | 0.39% | 7.39% | 0% | 1px | 0.03% | 4000px | 100% | 635px | 15.86% | 1px | 0.02% | 3504px | 58.4% |
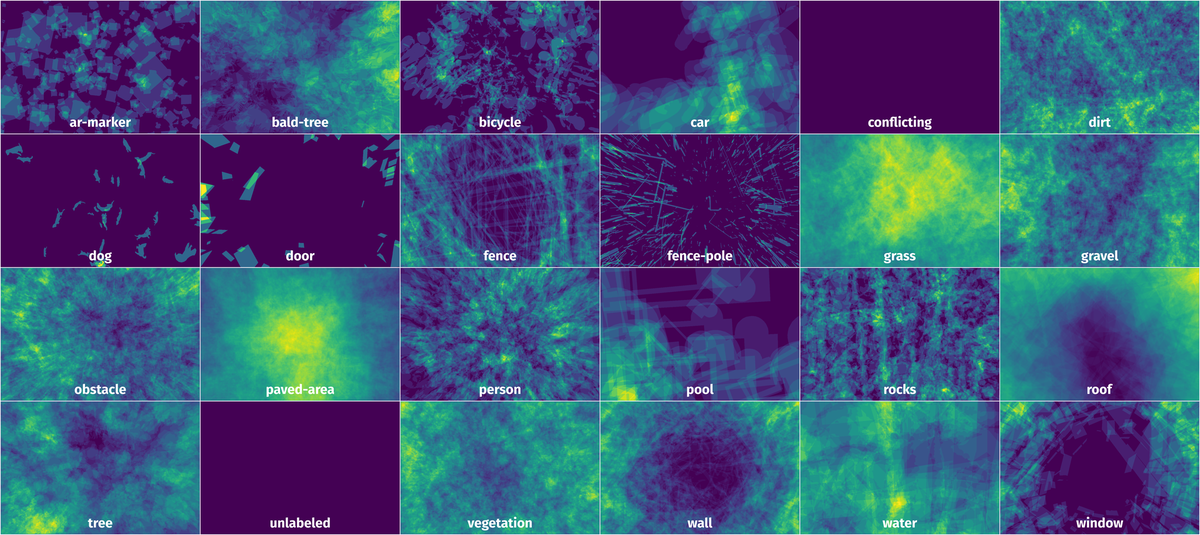
Spatial Heatmap #
The heatmaps below give the spatial distributions of all objects for every class. These visualizations provide insights into the most probable and rare object locations on the image. It helps analyze objects' placements in a dataset.
Objects #
Table contains all 40169 objects. Click a row to preview an image with annotations, and use search or pagination to navigate. Sort columns to find outliers in the dataset.
Object ID ㅤ | Class ㅤ | Image name click row to open | Image size height x width | Height ㅤ | Height ㅤ | Width ㅤ | Width ㅤ | Area ㅤ |
|---|---|---|---|---|---|---|---|---|
1➔ | grass mask | 457.jpg | 4000 x 6000 | 3997px | 99.92% | 6000px | 100% | 99.11% |
2➔ | grass mask | 457.jpg | 4000 x 6000 | 43px | 1.07% | 61px | 1.02% | 0.01% |
3➔ | grass mask | 457.jpg | 4000 x 6000 | 68px | 1.7% | 38px | 0.63% | 0% |
4➔ | grass mask | 457.jpg | 4000 x 6000 | 14px | 0.35% | 8px | 0.13% | 0% |
5➔ | bicycle mask | 457.jpg | 4000 x 6000 | 114px | 2.85% | 133px | 2.22% | 0.03% |
6➔ | bicycle mask | 457.jpg | 4000 x 6000 | 120px | 3% | 133px | 2.22% | 0.02% |
7➔ | bicycle mask | 457.jpg | 4000 x 6000 | 96px | 2.4% | 210px | 3.5% | 0.05% |
8➔ | bicycle mask | 457.jpg | 4000 x 6000 | 45px | 1.12% | 117px | 1.95% | 0.01% |
9➔ | bicycle mask | 457.jpg | 4000 x 6000 | 56px | 1.4% | 94px | 1.57% | 0.01% |
10➔ | dirt mask | 457.jpg | 4000 x 6000 | 66px | 1.65% | 82px | 1.37% | 0.02% |
License #
The Drone Dataset is made freely available to academic and non-academic entities for non-commercial purposes such as academic research, teaching, scientific publications, or personal experimentation. Permission is granted to use the data given that you agree:
- That the dataset comes “AS IS”, without express or implied warranty. Although every effort has been made to ensure accuracy, we (Graz University of Technology) do not accept any responsibility for errors or omissions.
- That you include a reference to the Semantic Drone Dataset in any work that makes use of the dataset. For research papers or other media link to the Semantic Drone Dataset webpage.
- That you do not distribute this dataset or modified versions. It is permissible to distribute derivative works in as far as they are abstract representations of this dataset (such as models trained on it or additional annotations that do not directly include any of our data) and do not allow to recover the dataset or something similar in character.
- That you may not use the dataset or any derivative work for commercial purposes as, for example, licensing or selling the data, or using the data with a purpose to procure a commercial gain.
- That all rights not expressly granted to you are reserved by us (Graz University of Technology).
Citation #
If you use this dataset in your research, please cite the following URL:
http://dronedataset.icg.tugraz.at
If you are happy with Dataset Ninja and use provided visualizations and tools in your work, please cite us:
@misc{ visualization-tools-for-semantic-drone-dataset,
title = { Visualization Tools for Semantic Drone Dataset },
type = { Computer Vision Tools },
author = { Dataset Ninja },
howpublished = { \url{ https://datasetninja.com/semantic-drone } },
url = { https://datasetninja.com/semantic-drone },
journal = { Dataset Ninja },
publisher = { Dataset Ninja },
year = { 2026 },
month = { jul },
note = { visited on 2026-07-20 },
}Download #
Please visit dataset homepage to download the data.
Disclaimer #
Our gal from the legal dep told us we need to post this:
Dataset Ninja provides visualizations and statistics for some datasets that can be found online and can be downloaded by general audience. Dataset Ninja is not a dataset hosting platform and can only be used for informational purposes. The platform does not claim any rights for the original content, including images, videos, annotations and descriptions. Joint publishing is prohibited.
You take full responsibility when you use datasets presented at Dataset Ninja, as well as other information, including visualizations and statistics we provide. You are in charge of compliance with any dataset license and all other permissions. You are required to navigate datasets homepage and make sure that you can use it. In case of any questions, get in touch with us at hello@datasetninja.com.